Motivation
For most problems of interest, the trajectory optimization problem is usually highly non-convex, which results in formulations that are hard to solve efficiently and reliably on-board through optimization-based approaches.
At the same time, learning-based approaches for trajectory optimization, although computationally efficient, typically lack critical constraint satisfaction guarantees for reliable real-world implementation.
In this work, we propose a framework to achieve the best of both worlds:
- Use modern Transformer models to warm-start traditional sequential optimizers and achieve faster convergence to higher quality solutions
- Enforce hard constraint satisfaction within learning-based approaches through warm-starting of sequential optimizers
Our Framework
Our goal is to develop a framework to train modern Transformer models for trajectory optimization problems. Our approach can be summarized through the following steps:
Step 1: We're given an optimal control problem (OCP) defined by:
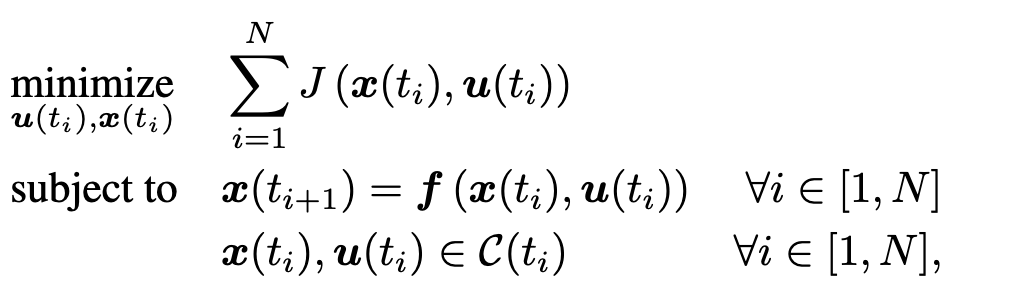
- Cost function J (e.g., fuel-optimality)
- Dynamics function f, potentially non-linear
- Set of constraint C(t), potentially non-convex
This setting is general and encompasses a wide variety of optimization problems of practical importance
Step 2: For the purpose of trajectory optimization, we define a trajectory as a sequence of:

- Performance parameters P (more on this below)
- States x
- Controls u
Step 3: To enable Transformer training, we collect a dataset of (potentially sub-optimal) trajectories by solving the OCP in (1) from various randomized conditions

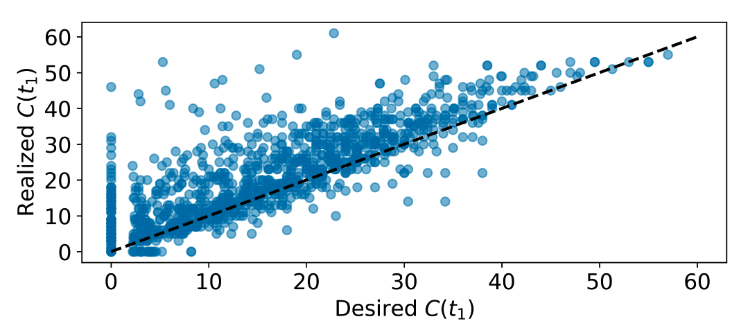
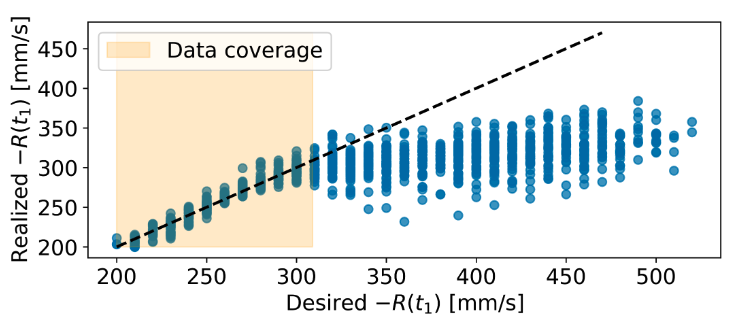
Step 4: In practice, we condition the trajectory generation using two main performance parameters:
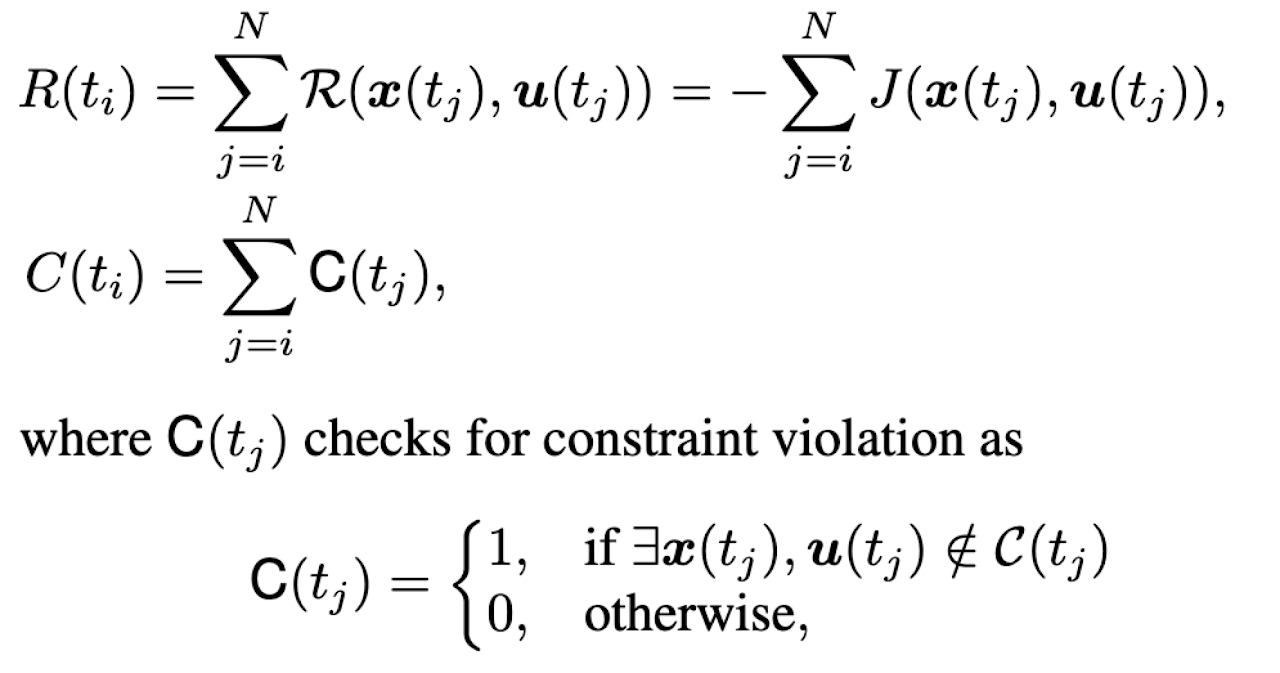
- Reward-to-go (R): defined as the sum of (negative) cost from time t onwards
- Constraint-to-go (C): defined as the sum of constraint violations from time t onwards
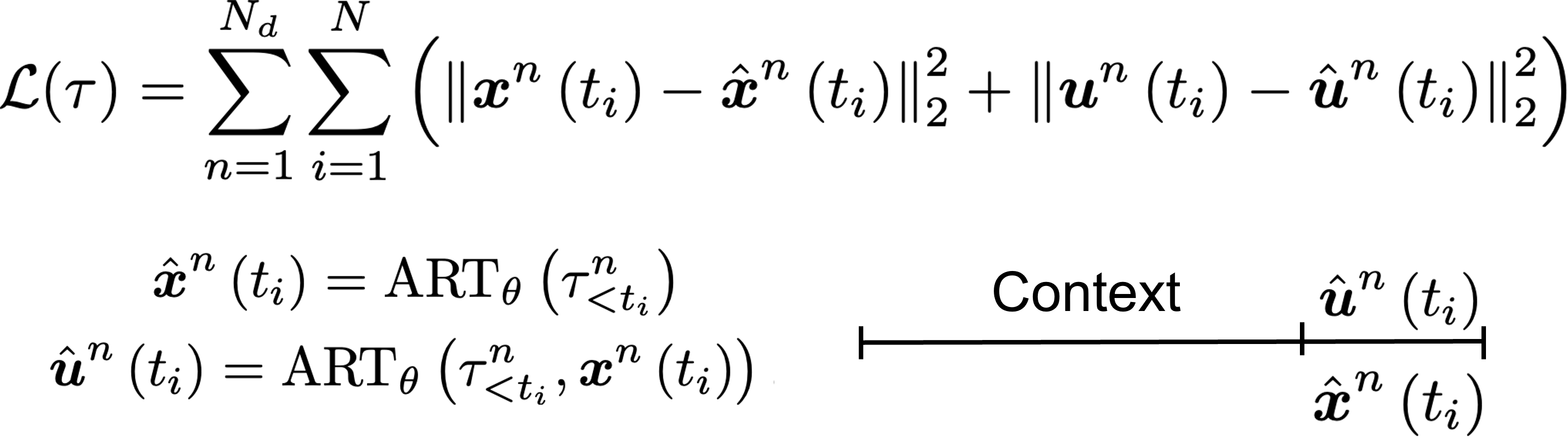
Step 5: We train the Transformer by minimizing the squared-error loss between true and predicted states and controls
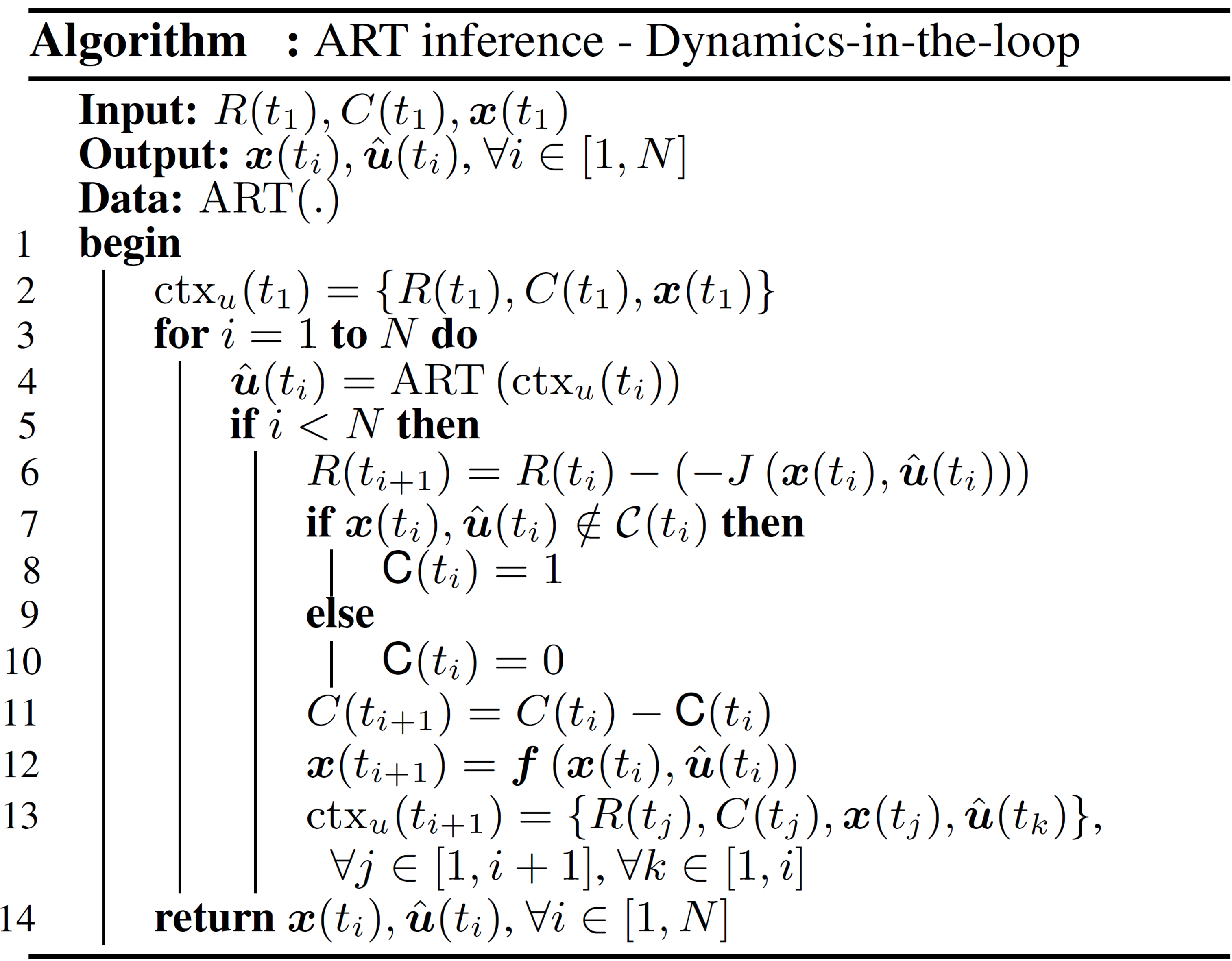
Step 6: We generate a dynamically feasible trajectory by applying transfomer-generated actions into an available dynamics model
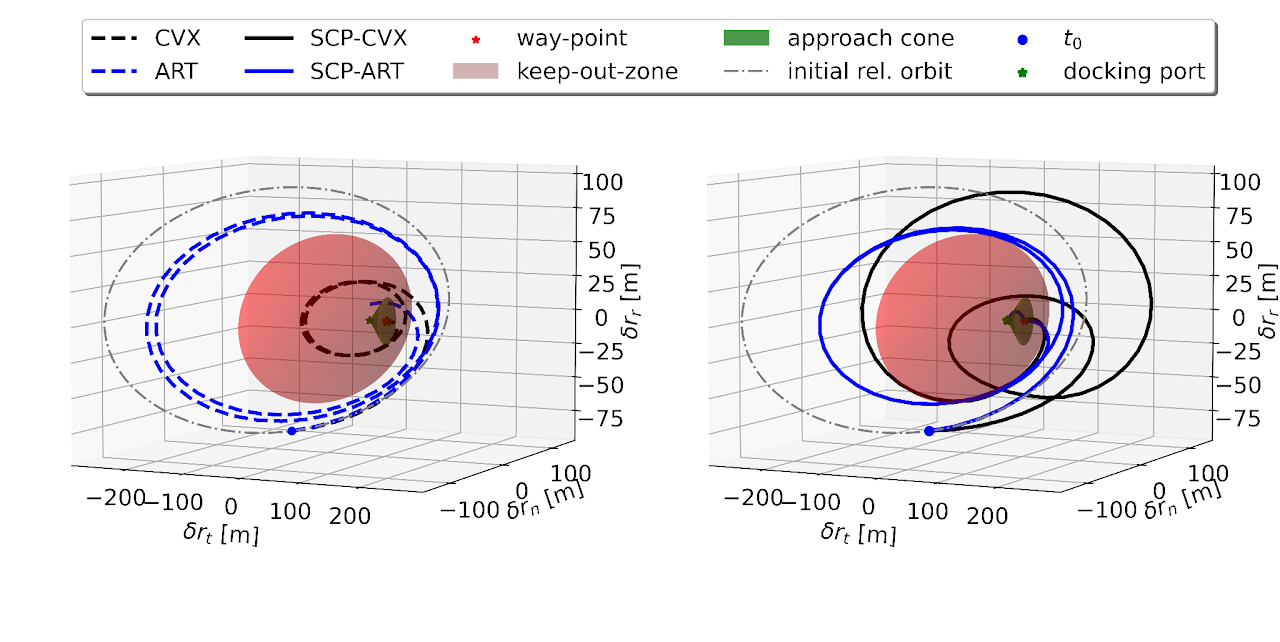
Spacecraft Rendezvous
Warm-starting through Transformers results in convergence to higher-quality solutions, as in this docking scenario:
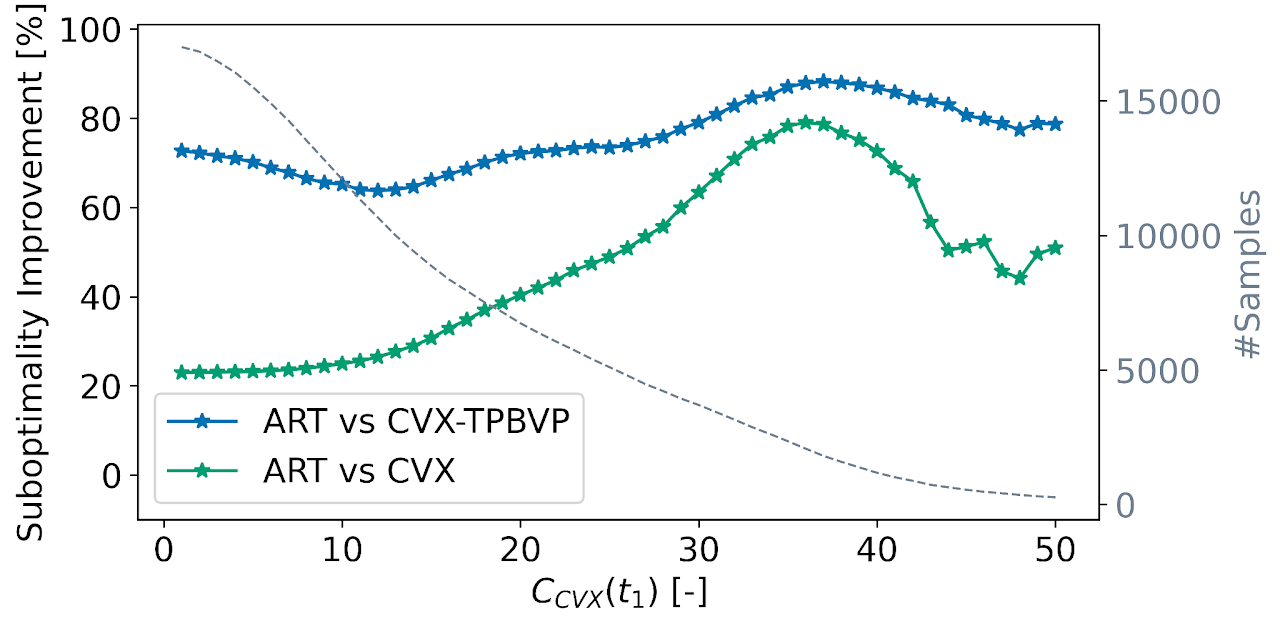
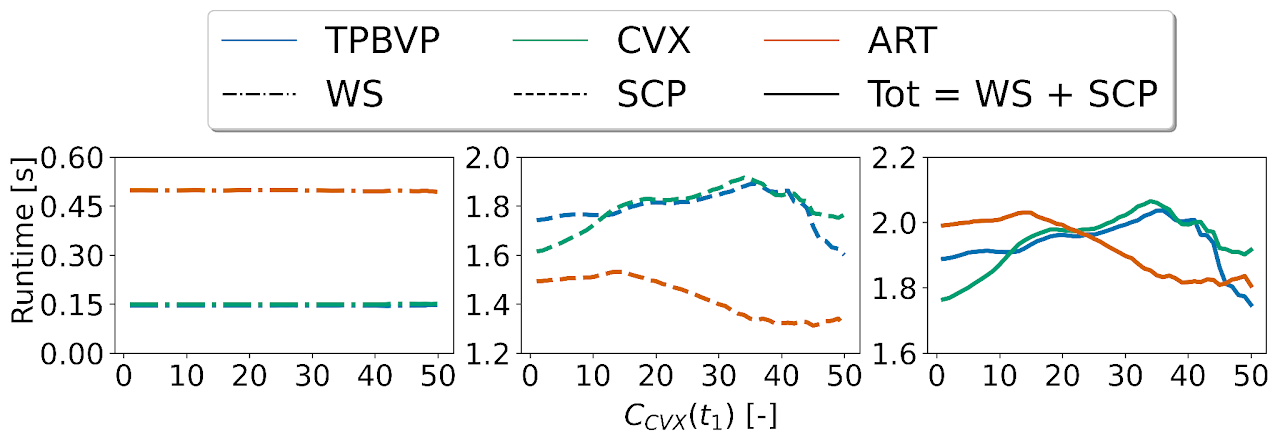
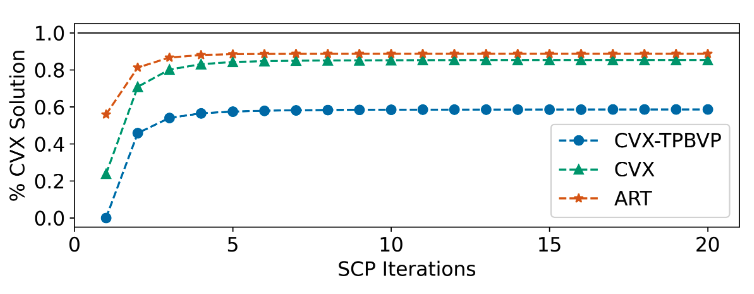
Transformers outperform competitive warm-starting methods both in terms of fuel-optimality and computational efficiency (i.e., runtime and SCP iterations)
Once trained, Transformers are able to replicate specific configurations of the performance parameter reliably, enabling a novel degree of control over the output of learning-based components
BibTeX
@article{GuffantiGammelliEtAl2024,
title={Transformers for Trajectory Optimization with Application to Spacecraft Rendezvous},
author={Guffanti, T. and Gammelli, D. and D'Amico, S. and Pavone, M.},
journal={IEEE Aerospace Conference},
year={2024}
}